IN THIS ARTICLE
ROS 2 GNSS Sensor Component
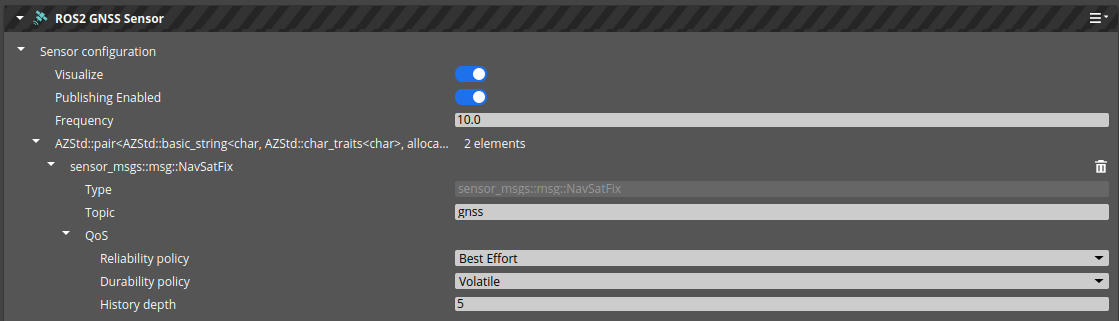
The ROS 2 GNSS Sensor component encapsulates the simulation of a Global Navigation Satellite System (GNSS) receiver, providing data as if it were a real sensor. GNSSs include systems such as Global Positioning System (GPS) and Galileo. The GNSS component publishes messages containing the current geographical location as specified in the NavSatFix message format.
Provider
Dependencies
Properties
| Property | Description | Values | Default |
|---|---|---|---|
| Sensor Configuration | See Sensor Configuration properties |
Usage
- Utilize the ROS 2 Georeference Component to establish the geographical localization of your level.
- Add the ROS 2 GNSS Sensor to your robot to simulate data emanating from a GNSS receiver.